CAD platform for programmable living CA SECTION 1: ABSTRACT Biology is becoming programmable, but it lacks much of the design infrastructure for exploring spatial systems. So, I’d like to construct a spatial design tool for engineering microbial consortia that exhibit programmable cellular automata behaviour by building a simulation engine that translates CA rules into genetic circuit specification that would first be validated in a wet-lab environment via Opentrons. The central hypothesis is that bacterial LuxI/LuxR quorum-sensing circuits can implement the neighbour-counting and state-switching logic of classical cellular automata, and that this mapping is regular enough to be captured by a simulation engine and ultimately predicted by machine learning models.
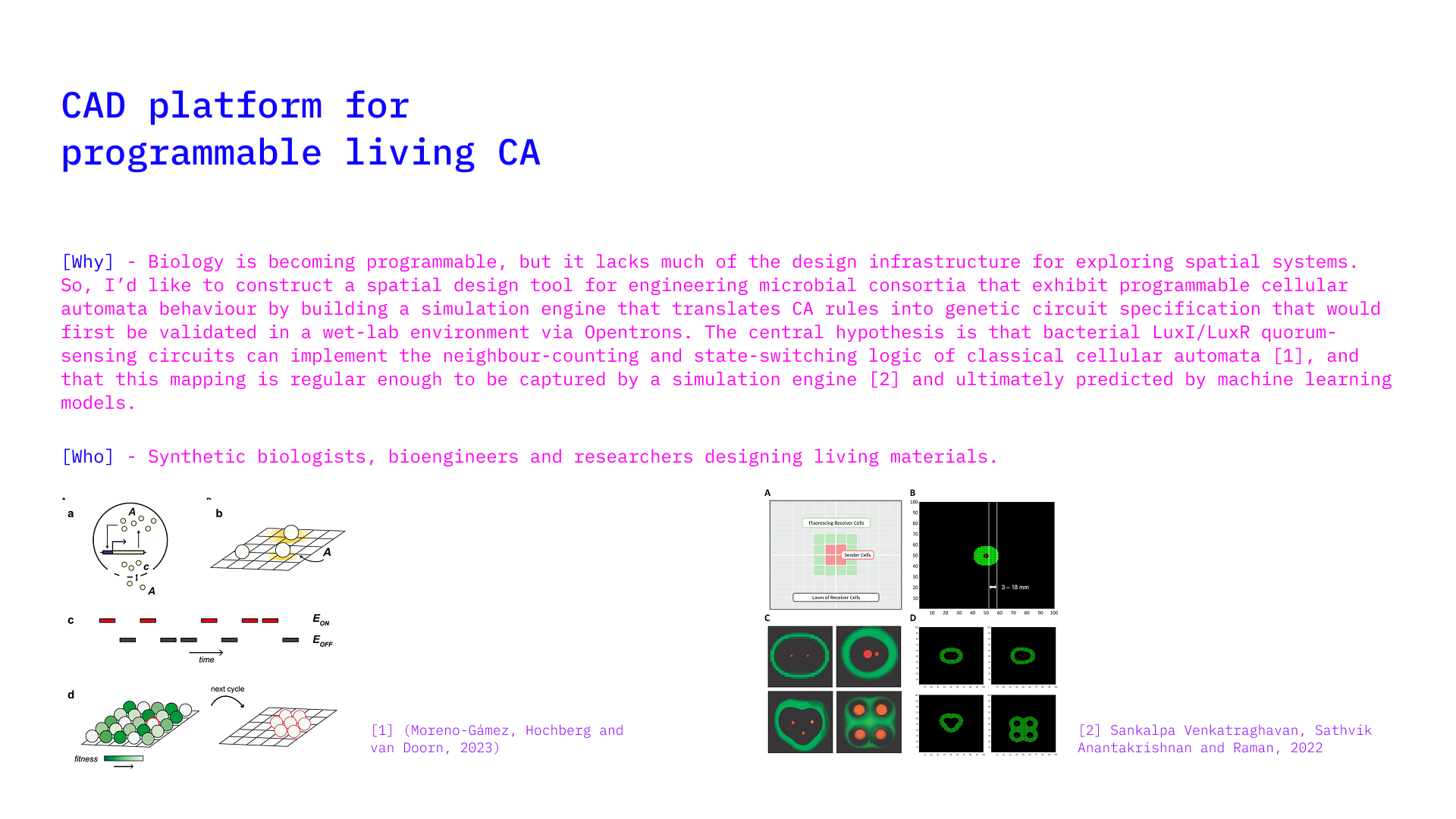
Biology is becoming programmable, but it lacks much of the design infrastructure for exploring spatial systems. So, I’d like to construct a spatial design tool for engineering microbial consortia that exhibit programmable cellular automata behaviour by building a simulation engine that translates CA rules into genetic circuit specification that would first be validated in a wet-lab environment via Opentrons. The central hypothesis is that bacterial LuxI/LuxR quorum-sensing circuits can implement the neighbour-counting and state-switching logic of classical cellular automata, and that this mapping is regular enough to be captured by a simulation engine and ultimately predicted by machine learning models.
SECTION 2: PROJECT AIMS
Aim 1 — Build a single sender/receiver CA unit
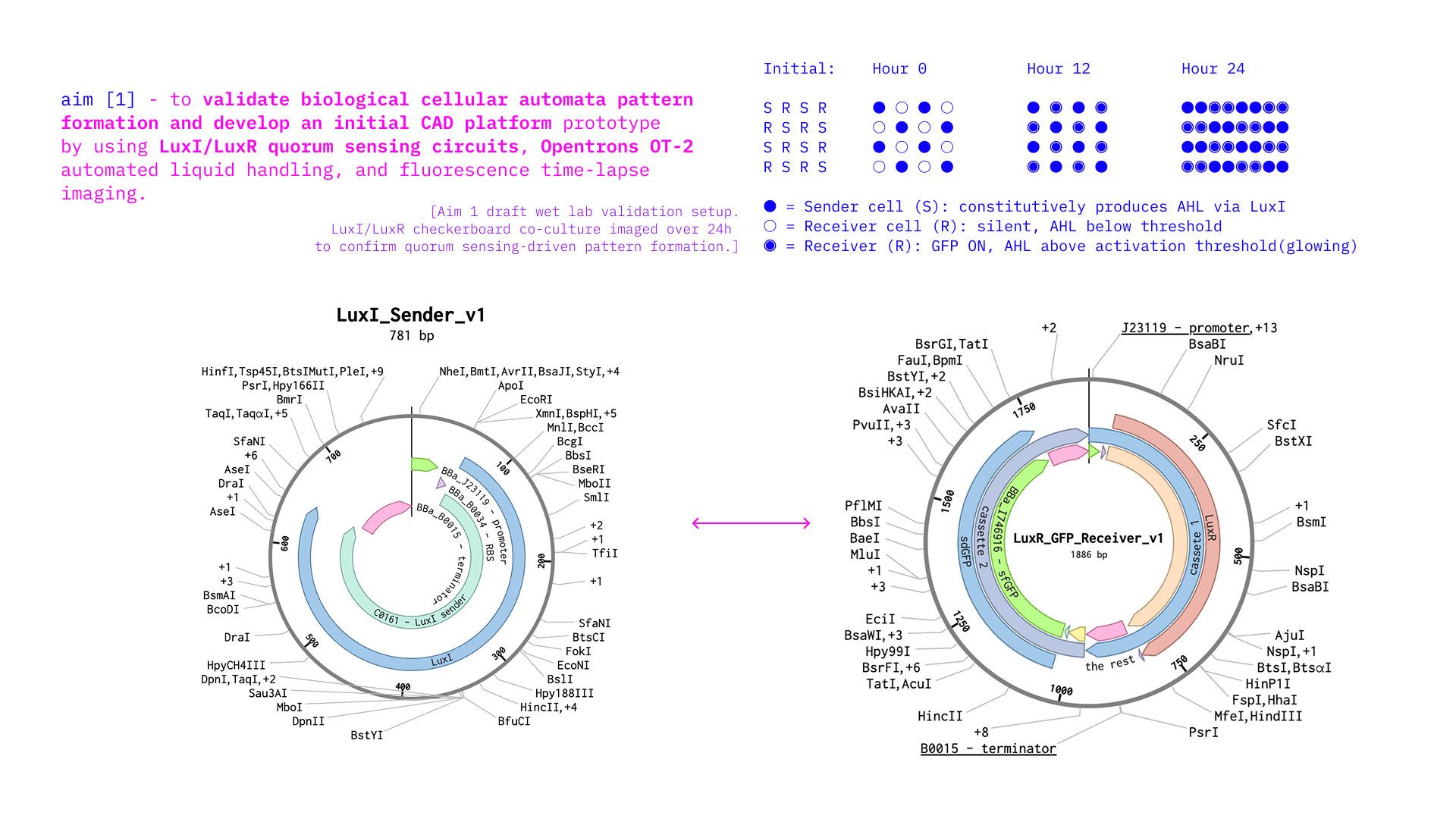
To validate biological cellular automata pattern formation and develop an initial CAD platform prototype by using LuxI/LuxR quorum sensing circuits, Opentrons OT-2 automated liquid handling, and fluorescence time-lapse imaging.
Sender cells express LuxI → produce 3OC6-HSL (AHL signal)
Receiver cells express LuxR + GFP reporter → fluoresce above AHL threshold
Goal: demonstrate density-dependent state switching (the CA rule in biology)
Aim 2 - Build ML-enhanced CAD tool for circuit prediction
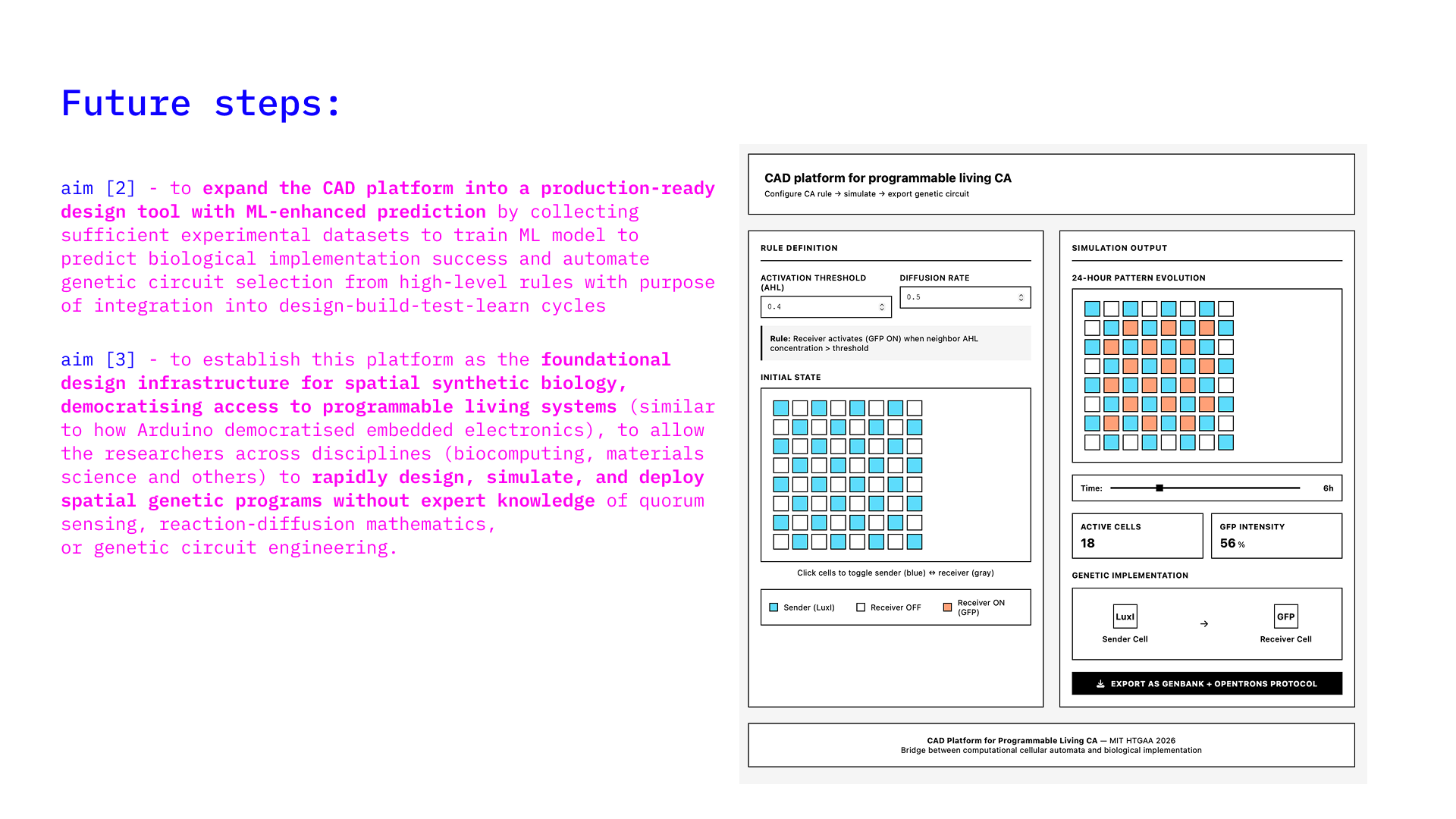
To expand the CAD platform into a production-ready design tool with ML-enhanced prediction by collecting sufficient experimental datasets to train ML model to predict biological implementation success and automate genetic circuit selection from high-level rules with purpose of integration into design-build-test-learn cycles
To establish this platform as the foundational design infrastructure for spatial synthetic biology, democratising access to programmable living systems (similar to how Arduino democratised embedded electronics), to allow the researchers across disciplines (biocomputing, materials science and others) to rapidly design, simulate, and deploy spatial genetic programs without expert knowledge of quorum sensing, reaction-diffusion mathematics, or genetic circuit engineering.
SECTION 3: BACKGROUND
1. Peer-reviewed research citations relevant to research
Synthetic biology has traditionally focused on engineering genetic circuits inside individual cells. However, there are still too few tools for designing multicellular spatial systems where cells interact through signalling. One important mechanism used in these systems is quorum sensing, which is where bacteria communicate by releasing and detecting small molecules called autoinducers (Windsor, 2020). This way, in the LuxI/LuxR quorum-sensing system, LuxI produces an AHL signalling molecule, while LuxR detects AHL and activates gene expression once a concentration threshold is reached. That creates a density-dependent state change that can be used to coordinate behaviour across populations of cells
Recent research has shown that quorum sensing can support collective spatial behaviour in bacterial populations. In “Quorum sensing as a mechanism to harness the wisdom of the crowds” (Moreno-Gámez, Hochberg and van Doorn, 2023), researchers demonstrated that quorum sensing allows populations to behave as distributed systems rather than isolated cells, particularly in spatially structured environments. Their work also used two-dimensional diffusion simulations, showing how neighbouring cells influence each other through signalling gradients. This is highly relevant to my project because it supports the idea that local bacterial interactions can approximate cellular automata-like behaviours.
Another relevant study called “Probing patterning in microbial consortia with a cellular automaton for spatial organisation”(Sankalpa Venkatraghavan, Sathvik Anantakrishnan and Raman, 2022). There, the researchers used computational cellular automata to simulate how local interaction rules produce larger emergent patterns across microbial populations. Their work highlights the usefulness of cellular automata as a framework for understanding multicellular biological pattern formation. BUT the study was primarily computational and never ended up connecting the simulations directly to experimentally deployable genetic circuits or automated wet-lab workflows.
Overall, these studies showcase a growing interest in spatial synthetic biology and microbial pattern formation, but there seems to remain a major gap between computational spatial models and experimentally validated biological design tools. My project addresses this by combining quorum-sensing genetic circuits, computational simulation, and automated experimental validation using Opentrons workflows
2. Innovation
This project is innovative because it applies concepts from cellular automata and computational design to spatial synthetic biology using quorum-sensing genetic circuits. While quorum sensing and microbial pattern formation have been studied before, most existing work focuses either on isolated biological experiments or purely computational simulations. My project combines these by proposing a CAD platform that translates high-level spatial behavioural rules into experimentally testable genetic circuit designs. The project also introduces and develops an innovative approach to an integrated workflow combining computational simulation, automated liquid handling with Opentrons, and fluorescence-based validation, helping bridge the gap between biological modelling and real-world experimental implementation.
Besides, it is also treating spatial synthetic biology as an engineering design problem rather than only a biological research problem. Current synthetic biology tools are largely designed for engineering single-cell circuits, but there is very limited infrastructure for designing multicellular spatial systems. By exploring whether quorum sensing can approximate cellular automata-like local state transitions, this project challenges the assumption that biological systems are too noisy or continuous for programmable spatial computation. The long-term vision expands the boundaries of synthetic biology by exploring how programmable living systems could eventually become more and more accessible through higher-level design tools and automation workflows.
3. Impact & significance
This project addresses the gaps in accessible design infrastructure for spatial synthetic biology. Synthetic biology is expensive, and there are currently very few tools that allow researchers to easily design, simulate, and experimentally test multicellular spatial behaviours accurately in vitro. This creates a major barrier for researchers outside of highly specialised synthetic biology laboratories. By developing a CAD-style workflow for spatial genetic systems, this project aims to make the design of programmable living systems more systematic and accessible by reducing experimental iteration costs and enabling virtual testing before wet-lab implementation.
For broader fields, the project is important because spatial biological computation could eventually contribute to many areas of science and engineering, including smart biomaterials, biosensing, biocomputing, tissue engineering, and environmental monitoring. Understanding how cells coordinate their behaviour across space could also improve our ability to engineer microbial consortia for medical or industrial applications.
If successful, this work could help shift synthetic biology toward more programmable, automated, and design-driven workflows. Similar to how AI-assisted tools have accelerated protein structure prediction and biological design, rather than manually engineering individual circuits, researchers could eventually specify desired behaviours at a higher level and allow software tools to generate, simulate, and optimise the underlying biological implementations, for example. The goal is to accelerate experimentation, improve reproducibility, and lower the barrier to entry for interdisciplinary researchers working with programmable biological systems.
4. Bioethical considerations
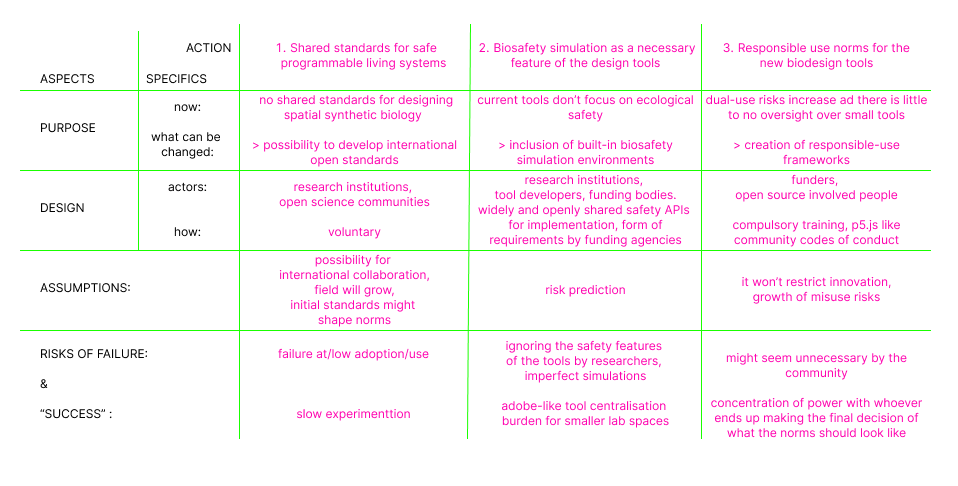
As programmable biological design tools become more accessible, it is important to ensure that they are developed responsibly and with biosafety in mind. One major governance goal of this project is ensuring biosafety and reducing the risk of harmful or poorly understood biological behaviour. This includes improving the prediction of biological system behaviour through computational simulation while also ensuring that simulations do not create false confidence in experimental outcomes. To support this, the platform should encourage experimental validation alongside computational modelling rather than relying solely on in silico predictions. Another important sub-goal is embedding biosafety directly into the software itself through built-in safety protocols, simulation warnings, and educational prompts within the user interface. Training and documentation should also be provided to help users understand both the capabilities and limitations of programmable biological systems.
A second governance goal is promoting transparency and responsible use while preventing misuse. Although automation and AI-assisted design can accelerate experimentation, the platform should maintain human accountability over final design decisions rather than becoming fully autonomous. Responsible-use guidelines and community standards could help reduce dual-use risks and encourage ethical applications of the technology.
Ideally, the platform would also encourage socially beneficial applications in areas such as environmental sensing, education, healthcare, and sustainable materials. Open scientific collaboration and shared biosafety standards may also help guide the development of spatial synthetic biology in a way that balances innovation with public responsibility.
One challenge is that overly restrictive governance could slow innovation or make the technology inaccessible to smaller research groups, while insufficient oversight could increase misuse risks. In addition, biosafety simulations may never perfectly predict real biological behaviour because living systems are inherently noisy and difficult to model. For this reason, the project should emphasize transparency about uncertainty, continuous experimental validation, and iterative safety review rather than assuming computational prediction alone guarantees safety.
SECTION 4: EXPERIMENTAL DESIGN/ PROTOCOL
1. Experimental plan
DAY 0 (Prep stocks + plates)
use:
LB broth: 100 mL
agar plates: 4
chloramphenicol: 100 µL stock used
DMSO: 100 µL
AHL: one aliquot
PBS: none yet
to do:
pour 4 LB chloramphenicol agar plates
make 100 mL LB + chloramphenicol
prepare 1 mL chloramphenicol stock
dissolve AHL to 10 mM in 100 µL DMSO
label OT-2 plates
DAY 1 — Transform sender + receiver
use
competent cells: 2 × 50 µL
LB recovery: 2 mL
plates: 2
chloramphenicol plates from Day 0
use
glycerol: 2 mL
black plate: 1
receiver culture: 10 mL
PBS: 10 mL
AHL stock: 10 µL
DMSO: already made stock
do
freezer stocks
500 µL culture + 500 µL 50% glycerol
sender + receiver
OT-2 AHL curve
Use 1 full 96-well plate
Receiver in all wells.
DAY 4 — Sender overnight culture
use
LB broth: 10 mL
chloramphenicol: 10 µL
do
Grow sender:
10 mL LB + chlor
for supernatant assay.
DAY 5 — Sender → receiver assay
use
black plate: 1
sender supernatant: 5 mL
receiver culture: 10 mL
PBS: 10 mL
do
Spin sender.
Collect supernatant.
OT-2:
sender supernatant dilution
receiver in all wells
GFP time-lapse
DAY 6 — Checkerboard CA pattern
use
sender culture: 5 mL
receiver culture: 5 mL
PBS: 10 mL
optional fresh plate
do
Build first:
sender / receiver checkerboard
Use same plate if signal stable, or a fresh one.
2. Techniques relevant to the project
✅ Pipetting
✅ Lab Safety
✅ Bioethical Considerations
✅ DNA Construct Design
✅ Databases (e.g., GenBank, NCBI, Ensembl, and UCSC Genome Browser)
✅ Opentrons
✅ Creating Code for Laboratory Automation
✅ Using Liquid Handling Robots (e.g., Opentrons)
✅ Chassis Selection (e.g., Dh5alpha)
✅ Registry of Standard Biological Parts
✅ Plasmid Preparation
✅ Bacterial Culturing
✅ Quality Control/Analysis
✅ Bacterial Processing (e.g., Centrifugation, Lysis, DNA Purification)
✅ Creating Twist Order
1. Utilizing these techniques in the final project
DNA construct design is really important to my project because the quorum-sensing system depends on the design of the sender and receiver plasmids with very specific genetic functions. For this, I constructed two plasmids in Benchling where the sender will produce AHL through LuxI and the receiver expresses LuxR and GFP under the lux promoter, activating fluorescence only above an AHL threshold. I pasted (import was not working) standard biological parts from the iGEM Registry into Benchling, assembled both expression cassettes, then also checked cloning compatibility and restriction sites, and finally exported the sequences for Twist ordering. They will experimentally test whether quorum sensing can support local state-switching behaviours similar to cellular automata(CA) rules.
Opentrons automation is used in this project to support experimental validation and improve reproducibility across spatial signalling, so I could use the data again and again to do the machine learning. I will use the OT-2 to automate the AHL dose-response curve and checkerboard co-culture plating patterns in well plates. The aim is to measure the activation threshold, GFP activation over time, and also how signalling spreads spatially across the grid over 24 hours. In the longer-term vision of the project, the CAD platform would enable defining a spatial rule digitally and exporting genetic circuit designs and Opentrons protocols for experimental validation in the wet lab.
2. How To Grow (Almost) Anything Industry Council companies which could be associated with the project
Opentrons: OT-2 automates the co-culture and imaging workflow (Aim 1 validation)
Ginkgo Bioworks: I’m building a tool that can accelerate DBTL cycles
Basecamp Research: Trillion Gene Atlas could provide foundation-model-scale sequence data to improve circuit outcome prediction beyond lab-generated datasets
Asimov (Kernel): genetic circuit design automation overlaps directly with the CA to circuit translation engine
Twist Biosciences: DNA synthesis for LuxI/LuxR constructs
New England Biolabs: cloning reagents for construct assembly
Addgene: source and deposition of validated QS plasmid parts
Nuclera: accessible benchtop biofoundry that aligns with Aim 3 democratisation goal
SecureDNA: Safety features integration for an open-access spatial circuit design platform
Transfyr.ai: overlaps with the ML prediction layer in Aim 2
SECTION 5: Results & Quantitative Expectations
1. First Aim Validation
Currently waiting for the Twist order
1. Validation Focus:
I was planning on going further with this and testing of the expression of the constructs, but we haven’t received our DNAs, so all my validation data stayed at the digital stage. So, instead, I stopped at completing the computational design of both expression cassettes, from part selection through submission-ready sequences. This constitutes a design validation confirming that the sequences are correctly assembled
Exported both sequences as FASTA. Verified final lengths: Sender = 781 Receiver = 1,886 bp
Submitted sequences to the SecureDNA screening tool (securedna.org) to verify no biosecurity-flagged sequences are present (both passed)
Uploaded FASTA files to Twist TwistGene ordering portal added all the details
3. Synthetic biology techniques utilized in validating this aspect of your final project
DNA construct design for assembling the sender and receiver quorum-sensing plasmids in Benchling using iGEM standardised biological parts from the iGEM Registry + Databases, such as the iGEM Registry and Benchling sequence libraries, were used to import promoters, ribosome binding sites, and terminators for construction.
The project also involved creating a Twist order for further experimental implementation. Although the validation bit had not yet started, the constructs were designed and prepared for purposes of bacterial transformation, Opentrons workflows, and spatial signalling experiments described in the experimental plan.
4. Related data
At the current stage, validation data consists of the completed sender and receiver construct designs, sequence verification results, no errors when checking through TWIST, and successful biosafety screening outputs.
The sender construct is at 781 bp, and the receiver construct is at 1886 bp prior to synthesising
The expected datasets from the experimental part include:
spatial fluorescence heatmaps showing signal diffusion across checkerboard co-cultures.
My expectation is that the receiver cells remain OFF below a found threshold AHL concentration and activate GFP expression once the local signalling concentrations become high enough
2. Challenges Encountered Whilst Validating
The main challenge is that the physical DNA constructs had not yet arrived from Twist Bioscience. That limits the possibility of validation and getting to the computational and sequence-design stages. As a result, experimental testing of GFP expression, quorum-sensing activation, and spatial signalling behaviour could not yet be performed.
Then the assembly itself proved to be quite tricky. As this was my first time making such designs from scratch scartch I had some troubles working with the spacers. This required additional sequence checking through a range of readings.
Moreno-Gámez, S., Hochberg, M.E. and van Doorn, G.S. (2023). Quorum sensing as a mechanism to harness the wisdom of the crowds. Nature Communications, [online] 14(1), p.3415. doi:https://doi.org/10.1038/s41467-023-37950-7.
Sankalpa Venkatraghavan, Sathvik Anantakrishnan and Raman, K. (2022). Probing patterning in microbial consortia with a cellular automaton for spatial organisation. Scientific Reports, 12(1), pp.17159–17159. doi:https://doi.org/10.1038/s41598-022-20705-7.